/GTWeb
/GTWeb
Fully-Actuated Quadruped
Beta Prototype v4
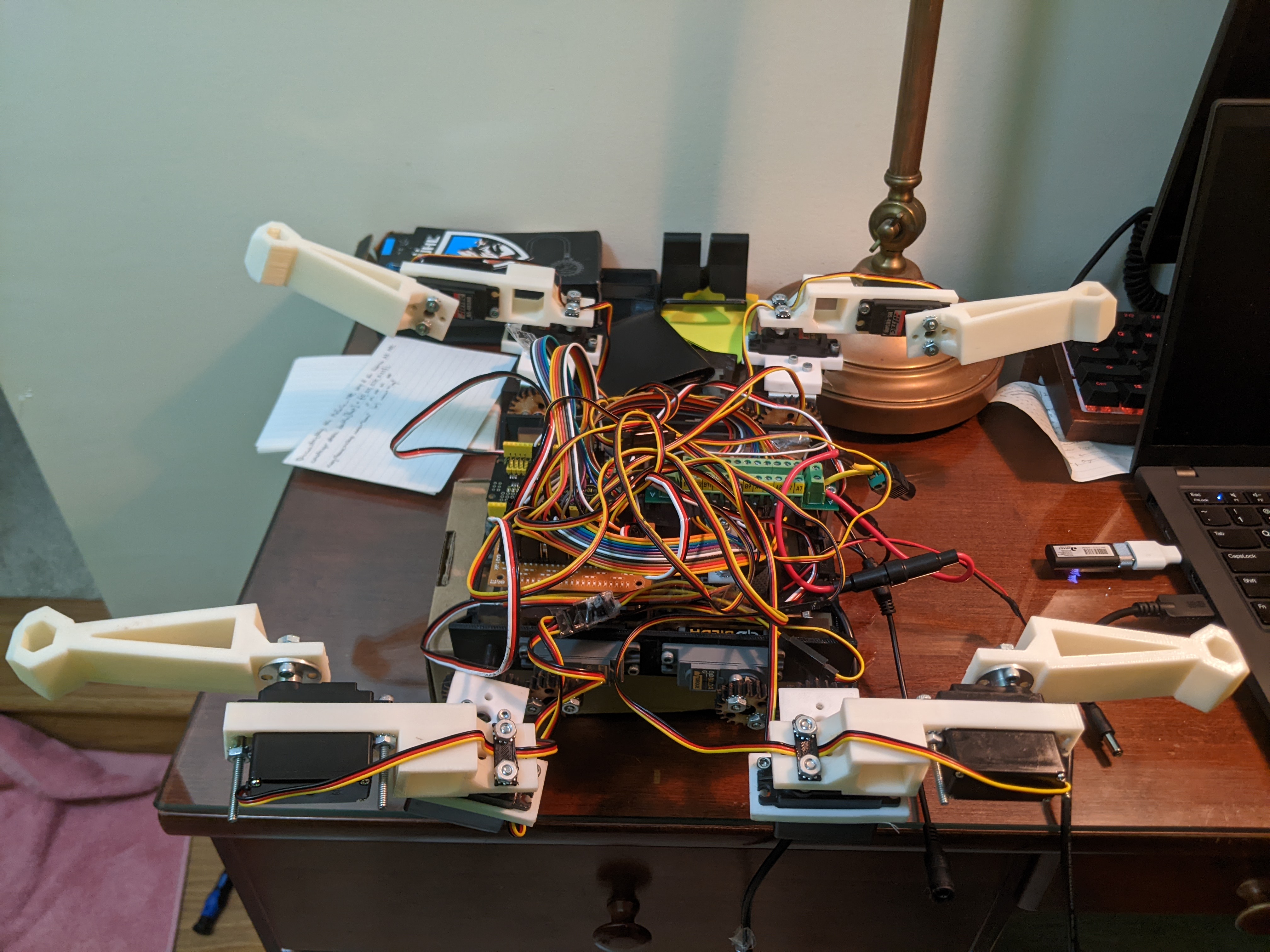
As the main project for my robotics independent research study, I am building a fully-actuated quadrupedal robot from low-cost, accessible components.
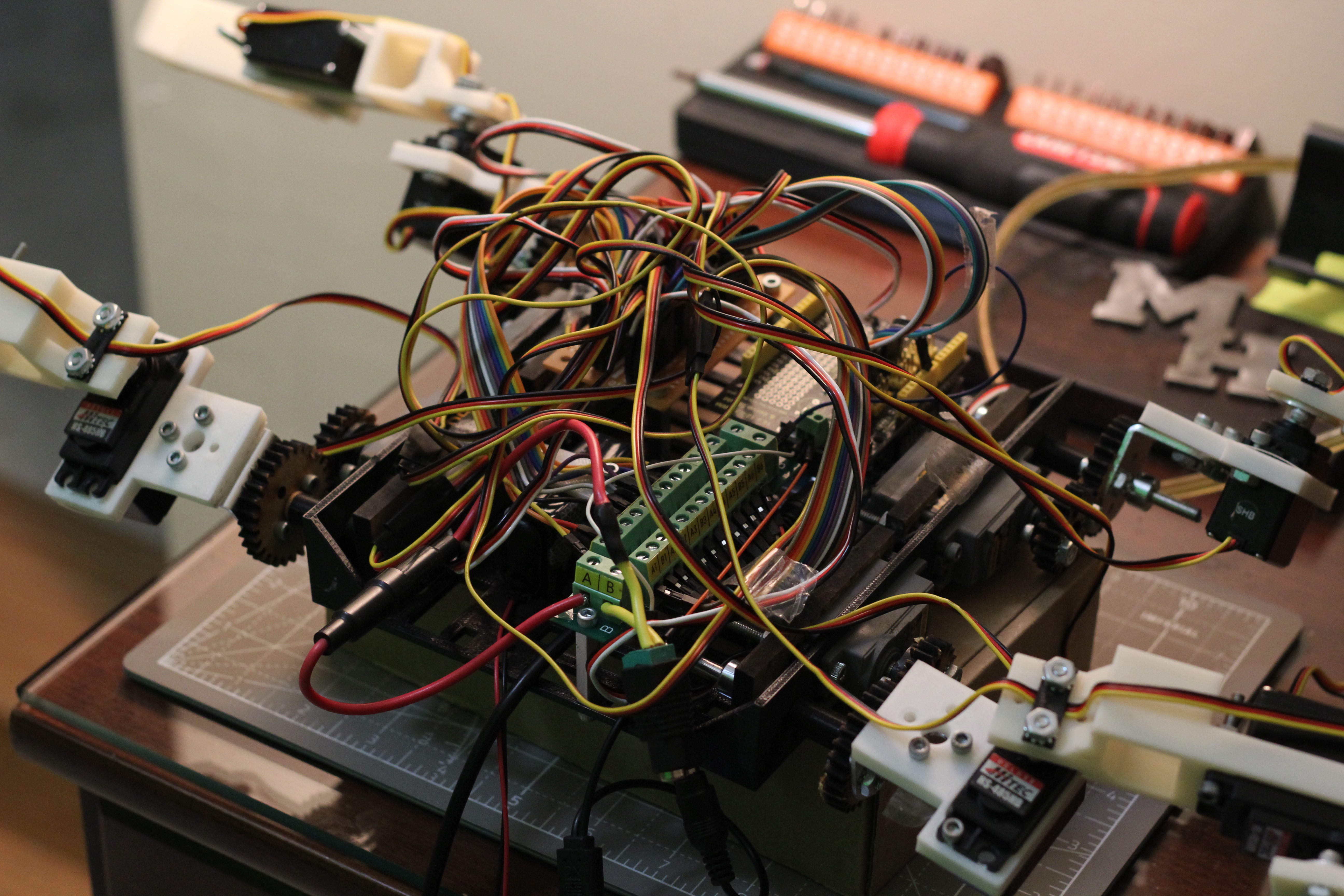
Featuring 12 positional servos and a whopping 15 Amps of current, wiring this was challenge—yet controlling its instablities will be harder.
Components
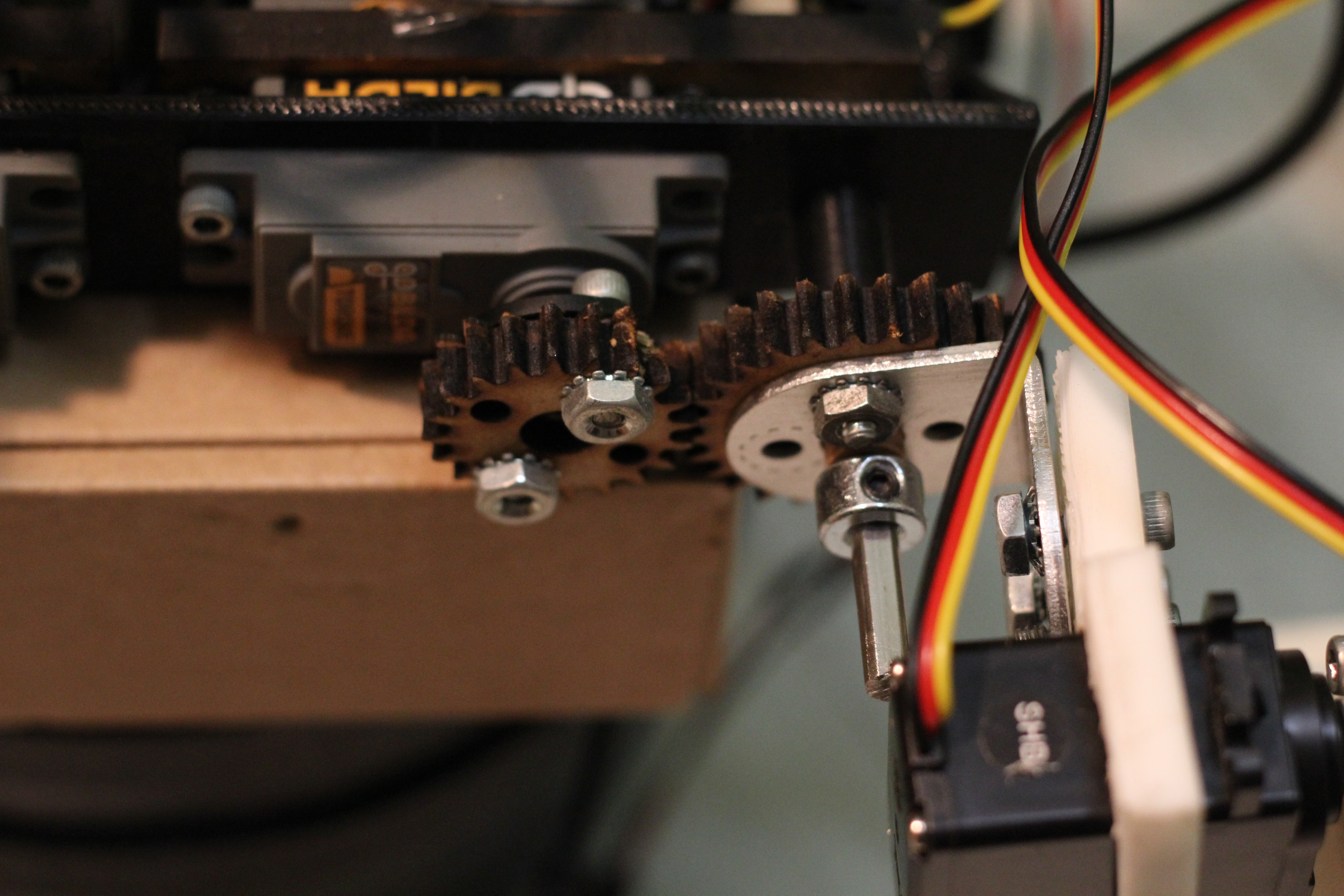
- 12 servo motors, 4 MDF gears
- Arduino microcontroller
- 15A 5V power distribution
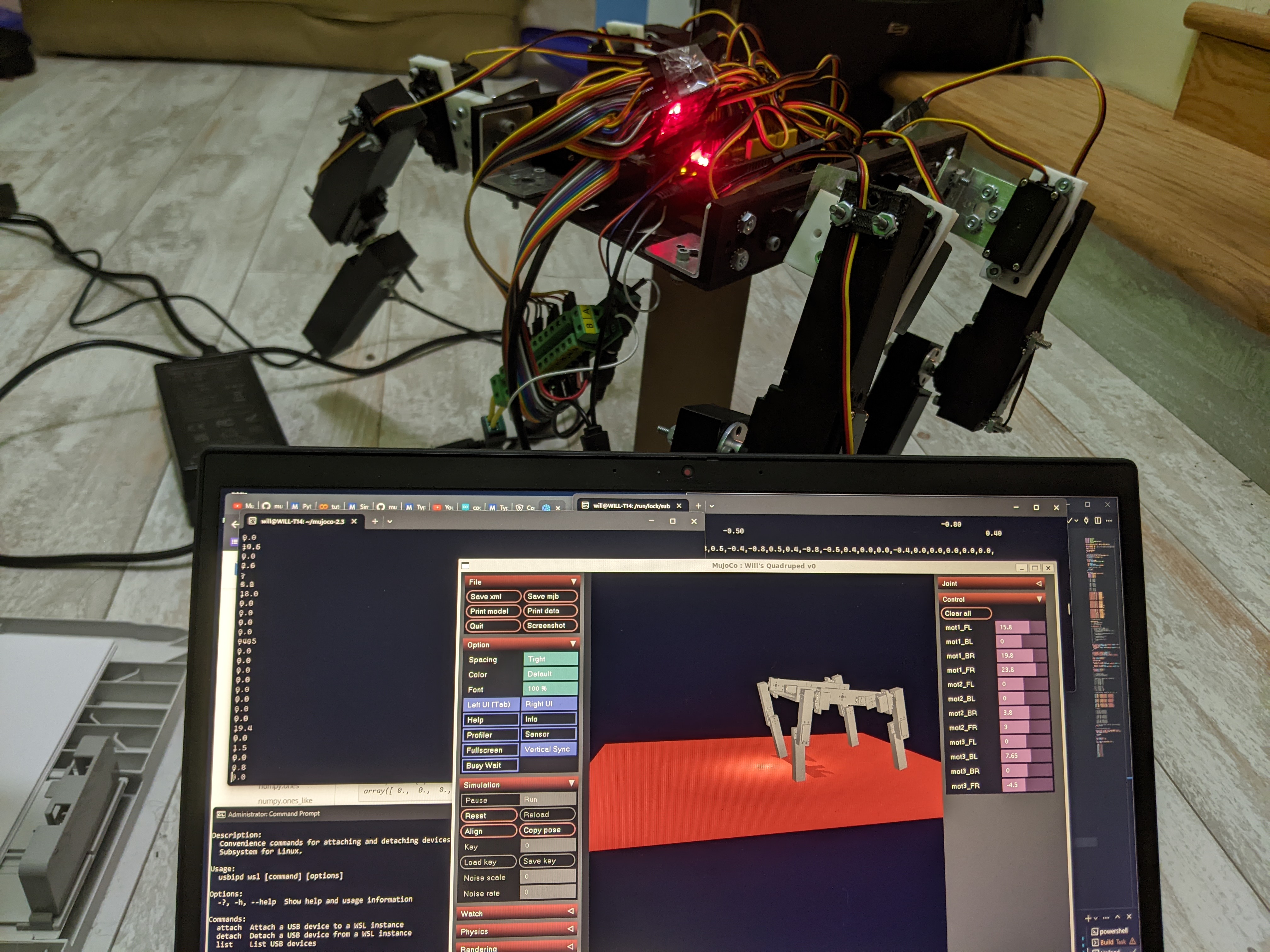
- Modeled with MuJoCo physics simulator Python bindings
Purpose
The LCFAQ is meant to serve as a cost-effective (≈$500) introduction to advanced biomimetic robotics for high school educators and students, utilizing accessible components that schools likely already have from FTC Robotics participation. The robot is programmable via an Arduino microcontroller.
While the current prototype does not walk yet, there are many planned improvements to increase the stability of the robot without investing in high-cost servos:
- High-torque shoulder gears (Done)
- Shorter chassis width
- High-friction feet
Control
The LCFAQ uses a novel control loop developed with the MuJoCo robotic physics simulator.
Each individually-addressable joint can be rotated from -π/4 to π/4 using the interactive MuJoCo simulate GUI. Assuming that all joints are correctly calibrated, a live preview will show the current pose of the quadruped.
Experience
This project allowed me to learn a considerable amount of new skills which I hope to apply to my future engineering projects:
- Simulation
- Modeling
- MuJoCo API
- Embedded systems
Some more photos:
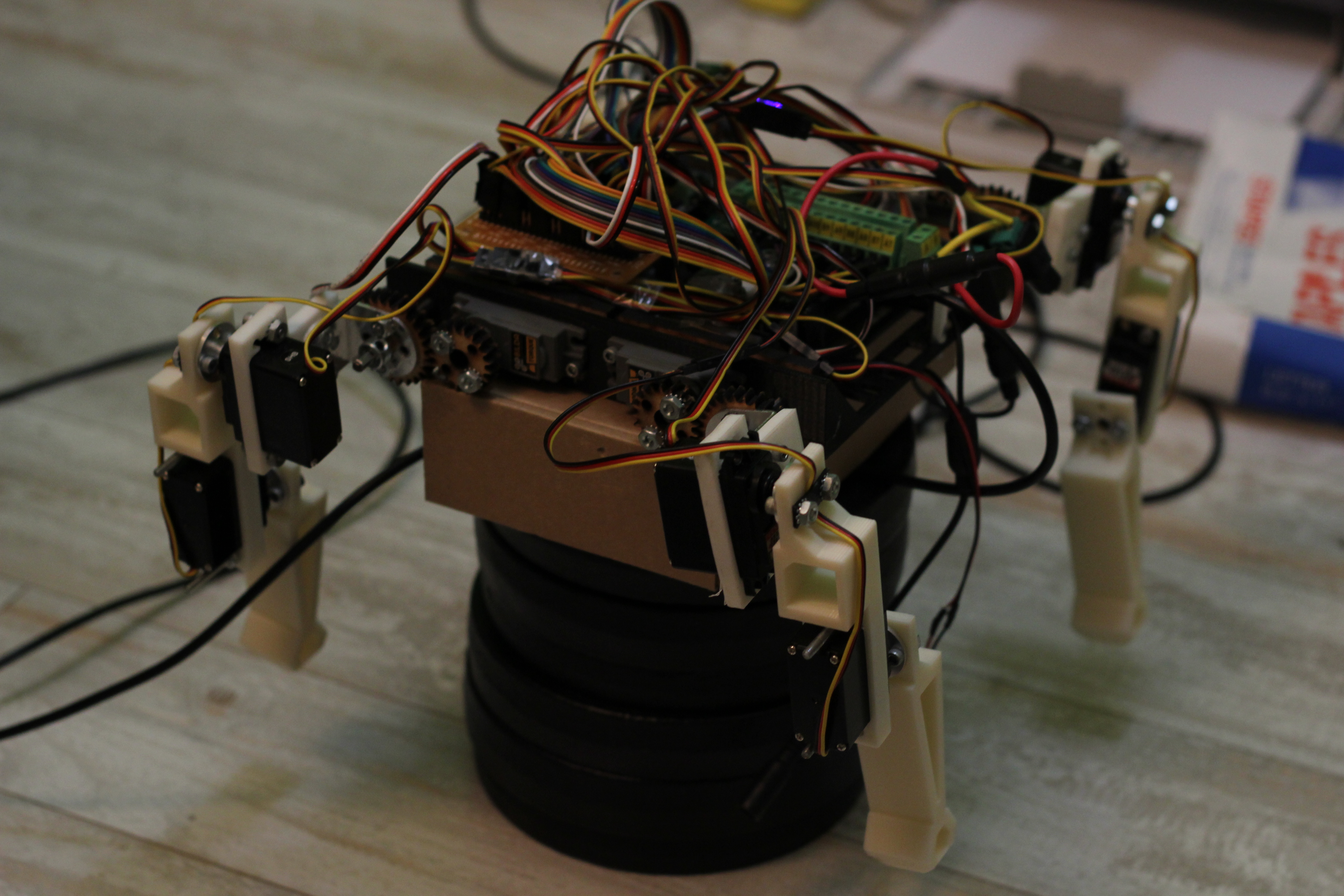
Beta Prototype: